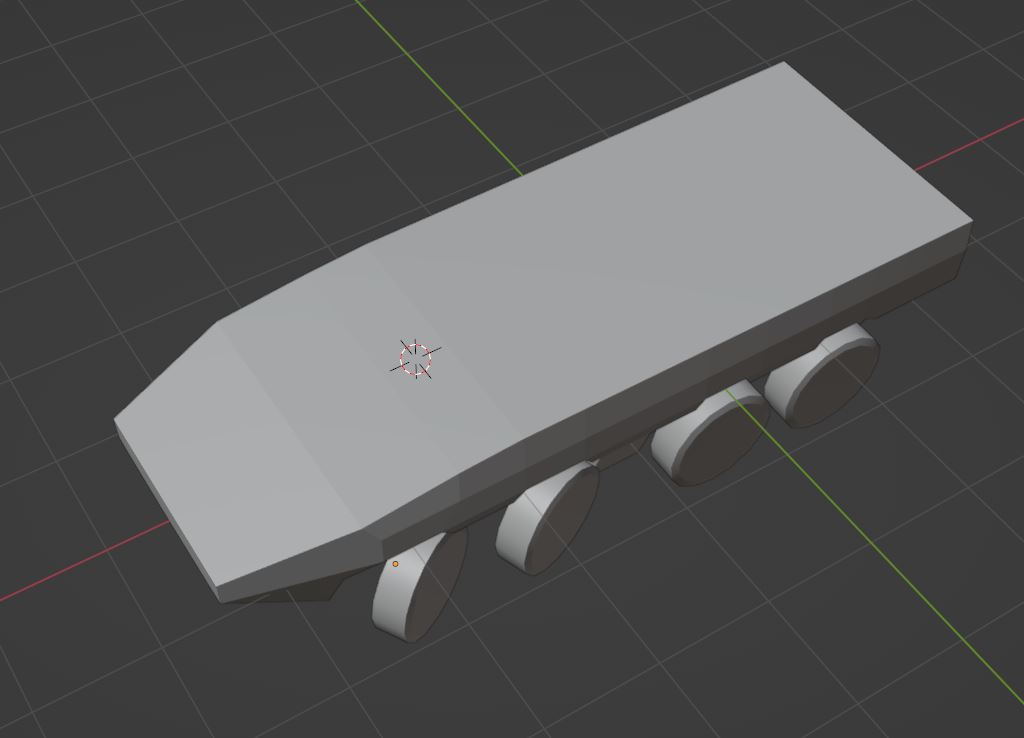
Okay, did some modelling in Blender since they keep denying their modelling is off, and here is what I got:
Front wheels can turn max of +/-30 degrees, anymore and the wheels will hit the front lower plate. Particularly of note is that the front chassis is thinner than the rear, makes sense though since the rear wheels do not need to turn and is often where soldiers are carried in the IFV versions. Second wheel set can turn just as much as the front but I have never seen them actually do this and are limited to +/- 20 degrees.
Here are some photos of my model (built off of orthographic views of the ZTL-11 + photos I got from your video on the raw chassis, thanks!):
I did some calculations, and it seems that +/-30 degrees can provide turning with a radius of 10-12m, so the wheel turning angle should be correct and agree with the source.
I also noticed that in the photo below, there is a huge angle between the wheel track and the direction the front wheel is pointing. Is this where the gaijin got wrong? I estimated that according to the picture, the turning radius should be about 13.5m.
Wheelbase from the model I made is 4.9m. Here is my bug report on this issue: Community Bug Reporting System finally had some free time to gather all our information and make an argument for it. Next up is to get the reverse speed fixed…
Oh, I wrote the wrong word, it should be wheel track. How many is the wheel track of your model? and can you measure the wheel track of the model in the game?
Wheel track should around 2.3m. I would not be able to measure the in game model without having a copy of their model I could open into Blender. I imagine theirs is a bit larger since the model looks a bit chubbier
There is a master’s thesis of BIT in 2018.
8×8 轮毂电机驱动车辆转向稳定性控制策略研究
They got an 8x8 wheeled IFV from the manufacturer for modification and experimentation.Although the research project may be worked for the new 8X8 chassis,the vehicle for modification, judging by the photo, should be ZBL08.
There is a table that lists the parameters of the experimental platform.The thesis states that the parameters are from the manufacturer.
Since it is a modification on the ZBL08, and not a newly made experimental car, then I think that there should be no change in parameters such as the wheel track.
In other words, this circumstantial evidence may indicate that the distance between the center lines of the two wheels should be 2600mm.I don’t know why your model is still a little smaller.
Do you measure the track from the inside or from the centerline?
I took it from the insides of the tires, not centerline. Measuring centerline in Blender is a pain and the reference image I was looking at for wheel track I thought it showed from the insides of the wheels. But yes, from centerline of wheels 2.6m would match what I have:
Oooo, thank you for this document. I will add it to the bug report as an additional source to help ensure when the devs take a look at the report they won’t deny it.
Thank you for the solid evidence, I was suspended before.
It’s OK for someone to say I’m a duper without looking at the newly added evidence, and it’s not allowed for me to complain here. Awesome.
Now it’s up to Gaijin to see if he can solve the problem as soon as possible.
Hello, I don’t know if you noticed this post, the results of its discussion and the unpleasant process.
Do you agree that the ZLT11 has a huge bug in its turning radius and will it be fixed?
As I said, the last issue about this bug passed, but the process was not pleasant. Can you give us a definitive result?