Alright, here’s some information on r-77 on how it tracks, datalink, guidance delay, etc. I would assume a lot of other fox 3s employ similar methods as this. This is from the Russian magazine Крылья Родины which the r-77 patent refers to as a reference point for the missile.
Before launch
About 10 seconds before entering the authorized launch zone, the rocket starts operating in “pre-launch mode” and recieves information about the target from carrier.
At the command “start”, the automatic power is turned on, and information about the target is stored in the missile and the fins are unlocked. They are given a preliminary deviation from the carrier in order to safely separate from the carrier.
If located on a rail launcher, then the engine is ignited immediately. If located on an ejection launcher, then the pushrods are triggered first, separating the rocket from the aircraft, and then after a delay, the engine is ignited.
If target is in the case of “minimum range” of when seeker head is to activate, then missile goes active immediately.
images
During flight
Missile guidance is a combination of both inertial and active radar homing at the final section of the trajectory.
The transition to the latter is carried out by the signal of the on board computer, which determines the distance of the target with the homing head.
After the missile switches to active radar homing, the correction line of the missiles flight data form the carrier continues to form a mathematical model of the target.
In case of loss on the trajectory, a re-searching of the target is done using this model.
In all application modes, the method of modified proportional guidance is used. And in conditions of organized interference, in which the host carrier can provide missile guidance of the direction and approach speeds for the target, guidance occurs along special trajectories.
The missile also employs the ability to passively aim at a source combined with a target.
Thoughts on how this is modeled in wt and general thoughts:
IMO, it seems like this missile has contant datalink with the aircraft, even after the missile seekerhead locks onto its target. This should enable the ability to relock the target for the missile if it loses track and if host aircraft manages to keep track of target. Currently, this only happens if the target is in “look down” when IOG+DL will be activated, if target is in look up, it will not use IOG+DL and will simply lose target if they notch it early.
The missile loses datalink if the host radar switches radar mode, which idk if irl will make it lose datalink with aircraft, but in WT it does.
This missile seems to kinda employ similar methods of datalink like the AAM4 that @Xeno_quaza talks about, unless I am misunderstanding something horribly about aam4
It seems like fins should be activated right off the rail in wt when rail launched. IK other missiles like amraam also activate the fins right off the rail IRL when rail launched, but in game all fox 3s seem to be modeled with their ejector launch fin delay.
even assuming a 10m/s ejection (which is average to somewhat fast for ejectors) (and g = 10 for easy math)
position function comes out to 2.5t^2+5t=150 which gives and incredibly long delay (almost 7 seconds)
and that is the best case assuming the minimum safe distance listed
This is wrong,
DL (and IOG for that matter) only happens when the missile fully loses lock, there is no “lookdown” or whatever logic. Only fully lost lock (which takes X time after target dissapeared)
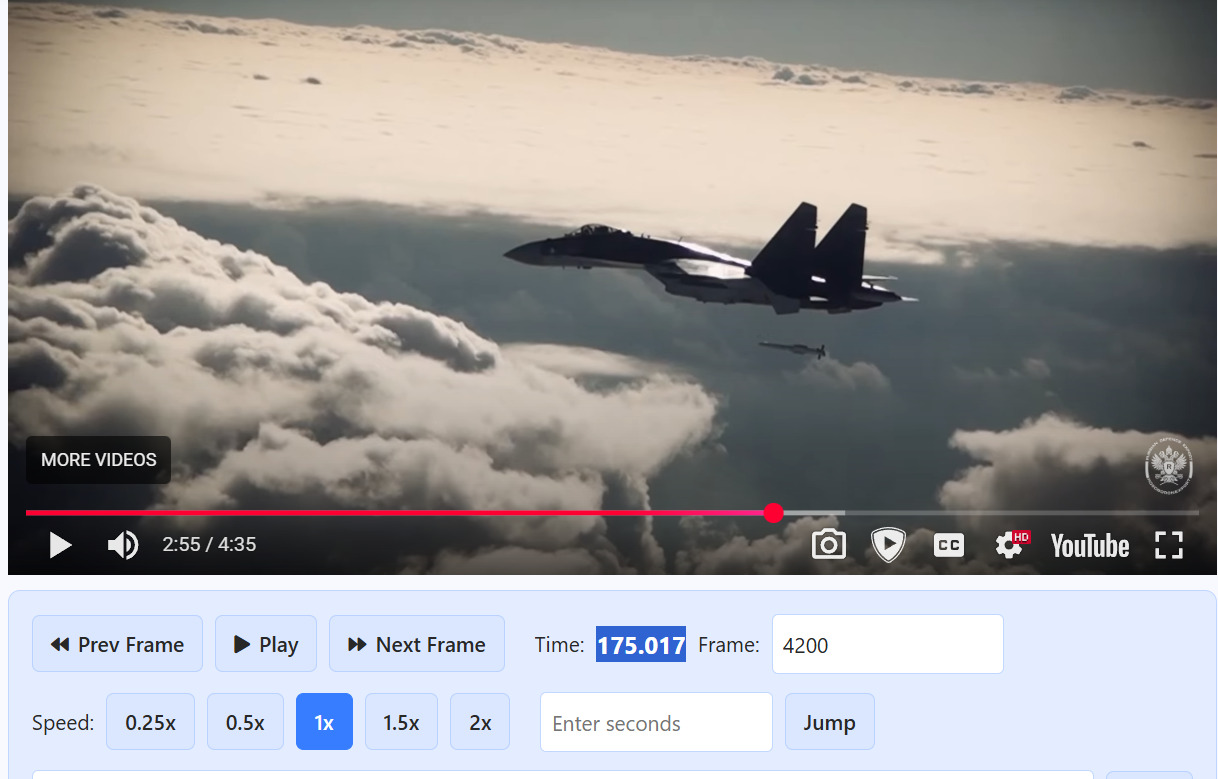
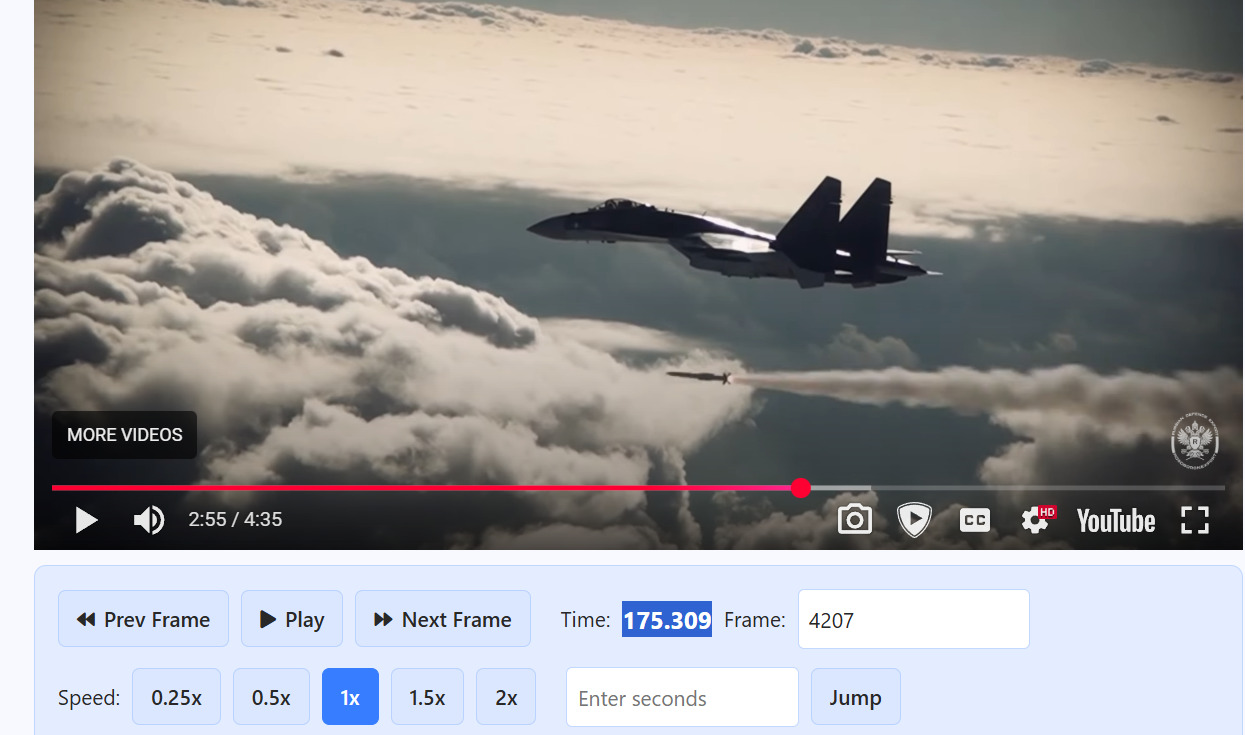
Decided to check out r-77-1 guidance delay from the rvv-sd export video.
Looks like r-77-1 guidance delay is pretty much correct at 0.3 seconds, irl it’s slightly less (probably at around 0.2 - 0.25 seconds) but close enough.
at t=175.017, booster is off
You can see in this image that even while the r-771 is still right underneath the plane, it still has a super hard loft trajectory/angle pointing up the plane
Yeah it looks pretty bad for it’s Time, but that’s not really something relevant to wt. Concept 3 is s great light tank for example, if this was real enough to be implemented I don’t see it going higher than 11.7
Radar seekers after AIM-7F in the game have radial acceleration rejection in range and doppler acceleration rejection as well.
They have angular gating (angular acceleration rejection) as well, but not a tangential linear accelebration rejection, which would eliminate chaff decoying function while notching on medium and short ranges, keeping only masking function.
Ahhh, the acceleration rejection is only in regards to closure rate and not to total relative velocity? Okay yeah that makes a lot of sense.
And yeah I forgot to mention that pulse doppler missiles retain radial acceleration rejection from continuous wave ones, but they do lack doppler acceleration rejection? Unless i’m reading their files wrong? please correct me if I am.
I mean if a radar seeker after AIM-7F has range or Doppler speed gate it also has acceleration rejection to ingnore anomaly accelerating target in the gate.
If it wouldn’t be much of a bother, would you mind clarifying which variable is the doppler acceleration rejection? I assumed it was “rateLimit”, which is lacking from Pulse Doppler seekers?
Implementing of tangential linear acceleration rejection is difficult because of the nature of the primary parameter source - the angle.
If there is an angular error, it introduces increasing error of tangential linear position of the target as the range increases. At certain range the error becomes so high, so the tangential acceleration (2nd derrivative) is not precise enough to apply acceleration limit.
Looks like, if implemented in the realistic way, it can reject chaff only on short - medium ranges, may be maximum on 10 km for typical Fox-3 seeker. Can’t tell exactly - this is a subject to research.