Usually when SARH missile launches, radar needs to increase the PRF and duty factor to provide sufficient illumination of the target, very much a valid assumption.
1 Like
There is very much an open report on the topic, but currently all radar missiles uses normal seeker acquisition range + 5 km = max range
So it’s not necessarily issue just with the sparrow
1 Like
Thats why you have the automatic switch to HPRF…and doesn’t stay in MPRF. If it had a 2 different HPRF waveform sets then what’s the point of going to HPRF when you fire the missile? If we just switch between 2 waveforms you can do MPRF for all aspect tracking and then switch to the other to provide illumination. Like the N001 and N019, its tracks for 10ms and sends out CW for the next 20ms.
Again, it’s not due to a need to provide sufficient illumination but velocity ambiguity issue as I explained above. If not you could just guide the sparrow in MPRF(lower PRF) while keeping long pulse widths(=high duty ratio) for high power. Its not an power thing. Look at Matra 530, a LPRF radar was guiding it!
No.
And even if it was right or used a totally different HPRF waveform. There should still be no warning for some.
Yeah, its an issue that is a simple fix and known for OVER A YEAR.

2 Likes
PRF are not necessarily fixed.
The reason is simple, the Doppler frequency seen by the missile is much higher than the radar due to the missile’s higher speed, to ensure that the velocity data is unambiguous, the minimum PRF required for the missile will be higher than in radar search operations.
This is why, as you pointed out, maintaining Medium PRF throughout for launching in PD guidance mode is not possible.
Additionally for ECM reasons, Agile PRF selections are good for preventing the enemy’s ECM techniques. Although I am not sure if such a feature exists on Early versions of AN/APG-63
Also increase in duty factor is so that the average power transmitted by radar increases, give the SARH missile more seeker range.
The only concern is for time dividing PRF, I doubt the traveling wave tubes on AN/APG-63 can switch the PRF that quickly between 10-20ms.
Can the above two be achieved before launching missile? Yes that is certainly the case.
As for RWR warning, it’s a maybe for me
Maybe the HPRF are already sufficiently high so the velocity measurement is unambiguous, or maybe the PRF needs to increase further, such a change will may be picked up, depending on the RWR’s PRF measurement accuracy.
there is no reason for radar to continuously operate with such a high duty factor, because it increases the failure rate for the component.
All in all, a lot of the information is still missing.

3 Likes
Considering that the F-8 Crusader’s TWT is operating in the order of tens ~ hundreds of Microseconds (μs), switching in a few milliseconds (1000μs = 1ms) really shouldn’t be an issue for the F-15 since it’s building on at least 20 years of further studies and designs, especially considering the output waveform of TWT’s is dependent on the input, and that PRF is one of the easiest things to alter to a point.

The relevant info from above is that the AN/APQ-83 / APQ-124
- Has a pulse width of 0.7μs
- And a PRF of 833μs (1200hz)
1 Like
Sparrow works by comparing the difference between rear antenna signal from the launching aircraft and front antenna signal, so it actually has the same unambiguous required PRF.
Pretty sure it can, a cycle in RWS is 1 PRF phase for doppler measurement lasting 8.602ms, and 2 for other PRFs with same length where carrier frequency is FMd for Ranging.
And you’d need a good RWR for that, but some just mark missile guidance by seeing a CW in their direction. These are the RWRs that wont detect IF there is a change in PRF, like spo 15. They detect between LPRF and M/HPRF, give missile launch warning if CW, LPRF+CW or if signal from M/HPRF is strong( A distance thing). If not this kind of radars, it depends if PRF is changed and the ability to detect it.
In fact, messing around. 40kft 2 planes going Mach 2, and a sparrow flying at Mach 4. It would need up to ~90kHz for free clutter space. And even if we put a high flyer at M2.5 making the Vr(m-t) Mach6.5. It goes up to 94kHz.
And even planes like Mig 29 have the PRF from 160kHz to 220kHz. I forgot that the doppler shift is one way

Its higher bc the missile will be traveling faster than the homing radar. And as the missile is receding from the launching plane, the PRF will be lower.
1 Like
they should add the mig-25 but it can not go Mach 3 cause the only thing that can counter it would be the AIM-74 or the Tomcat’s main rocket because it only goes Mach 4.5 so that will be the only option. BR 13.0
They can add it and would fit good at BR 11.7. Not untouchable but able to do some damage
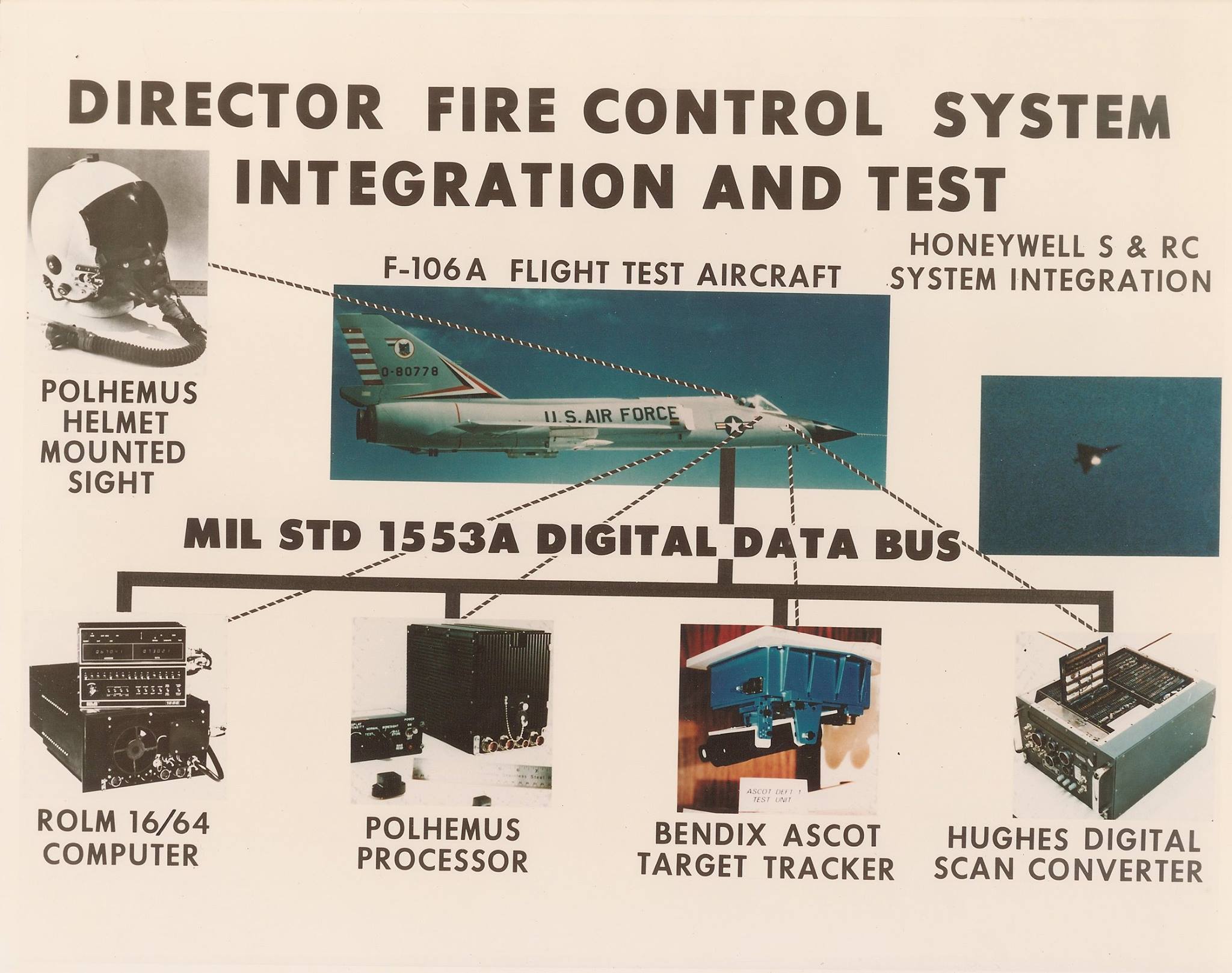
The F-106, AIM-97 (its basically an Air launched SM-1[RIM-66], with an IR seeker) & HMD are sitting in the wings waiting warmly, assuming the AWG-9 & AIM-54 prove inadequate, or never get fixed.


4 Likes
when was this?
I want whatever the USAF was smoking circa 1974.
Spoiler
Bootleg VTAS?? + IRST + AIM-4 (No proximity fuse, and almost certainly couldn’t utilize VTAS as the missiles was stored internally on their interceptor.
AIM-9J + AIM-7E2 on their F4 with no look-down capability.
“Hmm? Let’s not integrate anything the navy has been working on and make 2 new missiles.”
-
AIM-82 and AIM-97 start to be developed, and are promptly canceled.
-
Meanwhile the Navy makes the AIM-95 AGILE and already has the AIM-54 Phoenix, both of which blow anything you can make out of the water in every aspect. (AIM-95 is canceled because it is too expensive, screw you Congress)
“Uhh, well let’s see here. It is now ~1977 and we have”:
- Joint Service AIM-9L, Joint Service AIM-7F, no further developments for AIM-4 or F106, F-15 just entered service with the USAF’s first Pulse-Doppler radar.
Meanwhile, the Navy has:
- Joint Service AIM-9L, Joint Service AIM-7F, Brand new and wildly successful AIM-54, and F-14A is already ~5 years old with the Navy’s second Pulse-Doppler radar and Track-While-Scan functionality.
How was the Navy so much further ahead than the Air Force? Did the Air Force forget what Air Superiority means?
2 Likes
Considering The F-102 / F-106 was intended to go after Soviet Jet bombers it was less of an issue since all it was really supposed to do was intercept near defenseless targets, so taking a little bit more time to kill the bombers was a worth trade off And that the Falcon / Super Falcon prioritized performance at altitude, and with non-maneuvering targets lacking a proximity fuze, and using Nuclear warheads is less of an issue.
The F-4E did leave (ANG) service in '92 armed with the AIM-9M and AIM-7F
The F-110A (USAF borrowed F-4B) and early F-4C’s retained the AN/AAA-4 IRST, and the F-4E eventually received the AN/ASX-1 TISEO, so they did have Look Down sensor capability to some degree. Further, Semi-Automatic (BST, HOJ & AOJ etc.) and Manual illumination modes / work arounds did exist for Sparrow employment which aren’t modeled in game so it was less of an issue IRL.
The F-4C, -4D and -4G traded the Sensors away for TACAN / RHAW gear so had a significantly better chance at surviving a SAM encounter as they would be more likely to detect a threat, as was the major issue at the time.
The F-4E used the Chin station for the Gun so moved the sensor to the wing root.
It probably comes down to Clarity of Purpose, the USAF had to manage a ton of disparate commands (Frontline Airforce, Bomber command, Homeland defense, Reserves, Tankers, Tactical and Strategic Airlift, Reconnaissance, etc.), and had a lot more airframes on the go at any one time, and also the fact that The Navy had a keen eye and tended to stick with solutions and iteratively refine them, also cribbing Airforce homework often payed off (Technically the AWG-9 and AIM-54 are descendants of the USAF’s AN/ASG-18 and GAR-9(eventually became the AIM-47) development which were of spun off the LRI-X program which were to arm the prospective F-108, which was to pair with the XB-70, basically they ended up being part of the F-111B as a Joint platform and eventually going on to arm the F-14 ).
1 Like
Although the AWG-9 had a longer range and TWS, the APG-63 was more modern than the AWG-9, it was a digital radar that could be easily upgraded and found and tracked targets better. The AWG-9 radar was easy to confuse. And AIM-54 missiles were not very suitable for destroying fighters.
Mr. GILLEAS: Can you discuss in open session the dogfight capability of the Phoenix, as to the minimum capable ranges it has in a dogfight?
Mr. K. RICHARDSON: For the Phoenix missile? Sir, I cannot do that in an open session. I would be privileged to do so later.
Mr. GILLEAS: How would you rebut an allegation on the floor, if somebody says it is not usable for close-in combat, and that it is strictly a long-range standoff missile?
Mr. K. RICHARDSON: My only chance to refute that in an open session is to say, sir; that it is not true. And I would supply the data, which is classified, to indicate that it is not so. It is quite useful in close-in encounters.
(The information follows:)
The Phoenix missile has been designed to cope with a wide variety of targets under many attack conditions. For dogfights the missile has the following enhancing features:
- An excellent warhead with a large lethal zone.
- A well-proven self-contained proximity fuze.
- A unique and novel guidance system which is independent of the F-14 after launch (permitting launch-and-leave for engagement of another target).
- High maneuverability.
For close-in attacks against maneuvering fighters, the minimum launch range will be about twice that of other comtemporary radar missiles, because the rocket motor has been optimized for long range performance. The resulting firing envelope provides a formidable kill capability in most dogfights.
9 Likes
Assuming that the contemporary is the Sparrow, of which the minimum range is ~3200ft. Approximately ~1/2 Nmi [~989m], twice that isn’t actually that far at all, though i would doubt it would have great ability to sustain AoA immediately off the rail, and very much rely on the very large warhead & proximity fuse
1 Like
So why is it still at 17G’s 🤔
3 Likes
Two things, first the Phoenix is broken, obviously, second fighters in game (and the pilots in them) can sustain a lot more Gs than their IRL counterparts. The F-16 IRL can’t, under ANY circumstances, pull more than 9Gs because of its FBW limit. In game though it can do 14Gs if it’s low enough on fuel. The phoenix, even if given it’s IRL performance, will still be worse simply because planes in game are more maneuverable than their irl counterparts
4 Likes
That’s probably the same case for a lot of missiles in-game as well
1 Like
Speaking of missiles, can’t find the Sparrow topic but it was shot from an F-15 so here it goes. The sparrow chose to go for the guy behind me rather than the hot target in front. Smashing things with the 27ER gets boring but if this is the alternative I think ill go back to the Su27. Sparrows have been broken for the better part of 2 years now
1 Like