This doesn’t seem to be linking to the whole comment I made but the TL:DR is according to Austrian MoD and UK MoD:
Head-on; 80km
Rear aspect; 150km
Photographic identification range; 50km
Azimuth and elevation limits ~150 ° × 60 °
TWS of 500 targets
Ground targeting range; 50km
Passive rangefinding; no limit on range finding distance, but accuracy would drop with range, but its good enough for a launch at max range limits but maybe not enough for a passive 2-Way-Datalink shot without the missile needing to go pitbull.
It’s also immune to flares and IR countermeasures completely.
PIRATE was tested against several targets of opportunity, these included to the extent that I know of Tornado, Mig-29, F-4, other Eurofighters, B-2 bomber, F-22, F-35, various helicopters including Chinook, Merlin, Wildcat, Lynx, numerous airliners and civilian aircraft. PIRATE is normally left in operation and constantly scans in order to update its target recognition list so basically anything a Eurofighter has been within up to 150km of it will be able to recognise and classify.
Should be noted that the system is entirely passive and does provide kinematic ranging, as far as we can tell it does this very well as the Gripen reused the same base design in its SKYWARD-G IRST however it is supposedly worse. Also afaik every other passive IRST has been suggested that for accuracy improvements pairing of multiple sensors, this has never been even suggested for PIRATE.
It’s also not vulnerable to thermal shielding, as according to things like the ADAD report on which PIRATE was based, thermal shielding creates a ‘black hole’ around the aircraft making it easier for PIRATE to detect, classify, track and even identify such targets. The only caveat here would be if an aircraft could match its thermal signature to the background, but to do that you’d need to firstly know where the reference aircraft is from you to see what it would otherwise see, and again, passive system that defeats the purpose, you’d also then have to develop thermal shielding technology that can adapt to a certain temperature. At that point just copy PIRATE but better or make a better radar that makes PIRATE irrelevant.
There was a report a while back but its hard to phrase that the limitations of the FLIR should be identical to the gimbal limits of the IRST as the IRST sensor provides FLIR or something like that.
Optimal conditions so assuming at least mach and full burner for all. In sub optimal i’ve seen headon as 60km rear aspect as 92km and photo IDENT at 40km.
While the rest of the presentation is excellent, I have some problems with that. It is pretty clear that the Pirate IRST is capable of slaving missiles like the IRIS-T, ASRAAM, and AIM9s, however there has not been proofs that the IRST is capable of giving guidance to fox 3s, 2 way datalink or not.
The system is capable of passive ranging, with a claimed error margin of 20% at 100km (is the error linear with distance or not I don’t know), and works only by doing specific maneuvers with the plane. This makes it unlikely that the plane is capable of reliably guiding the missile unless the pilot does constant ranging maneuvers, and so it’s likely that this capability was never introduced to the IRST
I’m still looking for direct confirmation but we know that data is fed into the attack bus and directed toward the missile and targeting systems, there is no difference between data entry for Fox3s being guided by radar than by PIRATE.
Also I recall that when Mulata mentioned that 20% accuracy at 100km it was heavily disputed and iirc it said less than 20%, that would again allow you to guide it to a vague location and have it go active I think. We will have to continue looking but I understand the scepticism.
It’s also worth noting that that paper was written in the early days of PIRATE development and as gunjob shared the other day, PIRATE is still being updated even as recently as early this year.
The direct quotation is : range accuracies of better than 20% can be expected, even at ranges up to 100km, depending on the bearing measurement accuracy. So, realistically, I don’t think we’ll find a number below 15% accuracy at best (15-20% range).
I don’t know how this can be heavily disputed, as it’s a primary sourced accuracy estimation. Saying that the accuracy is actually much better would simply be extrapolating from nothing burger
Even if the data is fed similarly, the launch conditions for a fox 3 will be what dictate the possibility to fire the missile. If the range is not available, or without sufficient precision, the chances that the missile won’t launch or will fail to guide are much bigger.
Even with constant improvements the system remains passive. However modern the system is, it will have to rely on maneuvering to gather data for an estimate range, which comes with inprecisions.
And because you would need to maneuver constantly during the guidance phase of the missile, it looks to me more like an edge case scenario that is not implemented in the system, but that is my personal opinion.
My bet on the use of the kinematic ranging is to give an approximate route of the target for the pilot to take an intercept route and engage the target within visual range/with IR slaved systems.
Edit : as for the upgrades made to the IRST, it seems they are focused on other stuff than this kinematic ranging ability : The growth plans for the PIRATE system are focussed in two main areas; improved performance against surface targets and long range target identification… The IRST is currently a totally passive system but can be used to slave a laser onto a potential target for ranging. from « PIRATE the IRST for Eurofighter TYPHOON » by
Boyd Cook Technical Director (Eurofirst) Thales Optronics (UK) Ltd
Interestingly this source is also stating that the IRST could be used with a laser range finder, which hints at the limits of pure kinematic ranging and the possible need for a laser range finder * IRST fusion (which might be needed for fox 3 guidance or other systems integration)
Well that’s a given. The OSF on the rafale for exemple has a laser range of 50-60km from the top of my head. The OSF system is also much bigger and thus can fit bigger equipment than Pirate can. The rafale is able to range precisely at that distance and can guide a fox 3. It is however not passive and will trigger LWR equipped planes like the EFT, Rafale and other modern aircrafts.
Edit : PIRATE is 8kg while OSF is ~87kg. It has almost 11 times more weight availability for equipment
Also, the OSF of the rafale F5 requirement will be to have a LRF range of 100km, to the laser power requirement might not be that stupid
I talk about the 100km estimation because that’s the only one we know of as of now, and the best we can do is extrapolate from there. But without more information, it’s hard to say what would be the passive ranging accuracy of such a system at 50km. Is it still 20% ? 10% ? This we don’t know.
And what we (or at least I) don’t know, is whether a fox 3 can correctly be guided towards an aircraft with a 10-20% or whatever accuracy at a certain range (for exemple modern AIM120 loft, so if the range data given to them is incorrect, they could overshoot or undershoot the target without knowing it).
I personally have doubt that any system using passive ranging would have those capabilities, and the kinematic ranging of the PIRATE is mainly for vectoring towards target and general threat assessment.
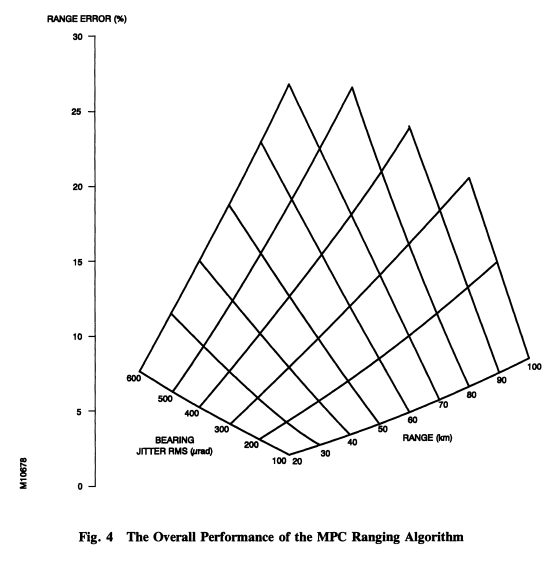
It’s not as simple as just being 20% at 100 km range. The accuracy depends on the amount of jitter and can be as good as 7-8% at 100 km range.
Spoiler
The fact the document says “accuracies of better than 20% can be expected” would suggest they expect jitter to be less than 300 µrad.
So if we assume a jitter of 300 µrad then according to the graph the ranging accuracy would be about 7.5% at 40 km, meaning the calculated range would be within 3 km of the true range. I have a primary source stating that AMRAAM should be able to successfully detect a 2m2 target so long as it is not displaced by more than 4 km from where the missile expects to see it. We can therefore reasonably conclude that the ranging data provided by PIRATE is accurate enough for AMRAAM guidance at 40 km, and likely some amount beyond.
For comparison sake the Rafale’s laser range finder apparently has a maximum range of 40 km.
The document comes from the early 1990s and isn’t even talking about PIRATE for a start. It’s about a technology demonstrator program that PIRATE was based on. It is entirely possible that further development work was completed in the 15 or so years between the paper being written and PIRATE entering service. As well as in the 17 years between PIRATE entering service and the present day.
But then again does it even need disputing given the above?
That’s an interesting graph. I guess the jitters come from small inaccuracies from movements of the target/plane and sensor limitations. Makes me wonder what were the conditions of the range acquisition of the target at 100km. If we stick to that 300urad, it would seem the max usable range to guide the aim 120 would be 40-45km, since above that we’d end up with more than your 4km leaway for the AIM120.
Interesting, I’ll have to find where that range comes from again.
But then again, as you say it so well, one of my main point about that mechanic is the fact that the plane needs to maneuver before getting a range. If the missile required guidance during its entire flight path, I do have questions on the usability of this mechanic for weapon guidance, since you might want to keep a somewhat accurate range for more significant time period until the missile can acquire the target with its own radar.
For example, it is known for the Russian aircrafts as well as the rafale that their optical + LRF systems can provide such guidance, but aside from these few informations about the kinematic ranging of the PIRATE, no informations actually hint towards the system being able to guide weaponry (only about slaving their sensors)
For a 40km shot that would only be ~18km of travel before pitbull. Say its averaging at a lower speed of mach 2.5 thats only some 20~ seconds of time PIRATE would need to provide guidance data.
Also if we assume head on attack, the jitter would likely be at its lowest. So the ranging data would be more accurate, target is unlikely to defend until pitbull and after that the PIRATE data is of no use.